A tanglebots workshop report
Posted March 24, 2016 by Dave GriffithsI've tried a lot of different ways of teaching children programming, starting a few years ago with primary school children in a classroom, then doing inset training days for teachers and finally private tutoring in homes. For the finale to the weavingcodes project we are trying a new approach, teaching families about code, robotics and thread by building "tanglebots".

The concept is to combine programming with physical objects, concentrating on sensor input and movement as output. It's important that we incorporate our weavingcodes research process, so deliberately setting goals we don't yet know the answers to.
Knitty tangle #tanglebot pic.twitter.com/qrnsu2HIi1
— Weaving Codes (@kairotic) March 20, 2016
The weaving focus allows us to ground the workshop in loom technology and demonstrate the challenges of manipulating thread, with its enormous history of technological development. For the first Cornwall workshop, Ellen started us off with an introduction using FoAM Kernow's Harris loom and the fundamentals of weaving. We were also joined by Janet and Jon from lovebytes who are helping us to run these events. When first talking about possible workshops with children, we'd discussed the impossibility of making a functional loom in a couple of hours with only broken toys and lego - and so the focus on tangling was suggested by Alex as a way to turn these difficulties to an advantage. Similarly we created a series of prizes for different categories such as "Most technical effort with least impressive result" - inspired by hebocon events.

The workshop format we used is also influenced by Paul Granjon's wrekshops - wherever possible we're recycling by pulling apart e-waste, making use of electronics, motors, gears and ideas from the surprising complexity of what's inside things people are throwing away. This turned out have a powerful implicit message about recycling, parents I talked to had tried taking things apart to learn about them, but the next step - making use of the parts discovered as we were doing here, needs a bit more help to do.
Also as normal for FoAM projects was the importance of the food, in this case tangled by Amber and Francesca to both provide sustenance and inspiration with cardamom knots, spiralised courgetti and tangle fritters.

The groups ended up a bit lopsided, so in future we plan to pre-arrange them as we did on the machine wilderness workshop. In order to do that we need to ask for more information from participants beforehand such as family ages and backgrounds.
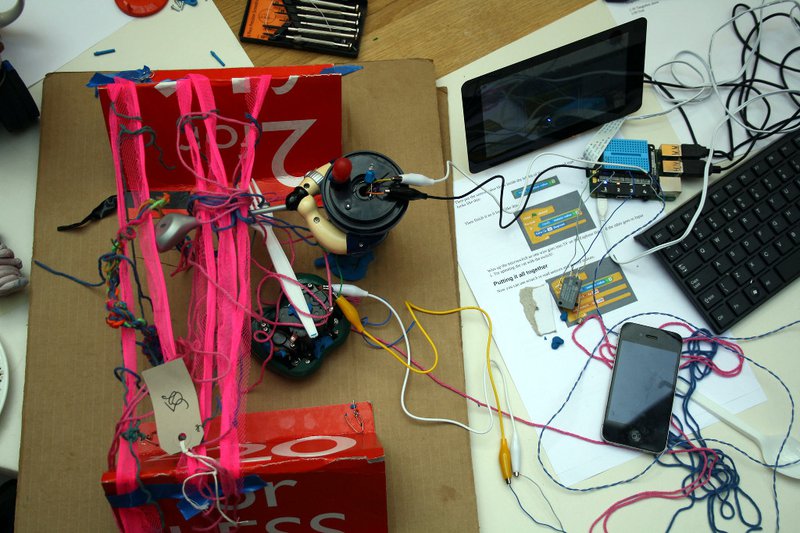
We tried using the small Pi touchscreens - these were a bit too fiddly to get away without a mouse, but are much less oppressive somehow than larger PC monitors - as they are so small, they became incorporated into the tanglebots themselves.
Crocodile clips were the best way to connect to random/plundered electronics as well as the lego motors. These removed the need for soldering (which we had set up anyway, but in a separate space).
A selection of other notes we made:
- Start with a manual tangling exercise (weaving with rope, tablets etc)
- Lego has a strange all or nothing effect, once you start using it - everything has to work that way, avoiding it may lead to more creative options than including it
- A first aid kit is needed for these sorts of things
- The Pimoroni Explorer Hats are good but needed periodic resets in some cases - the motors seemed to get jammed, not sure if this is short circuits interrupting the i2c comms?
- The Raspberry Pi docs are riddled with minor errors, e.g. the Scratch GPIO section on the explorer hats has a lot of sometimes confusing typos.
All our resources are being uploaded to the kairotic github repository so other people can make use of the materials. As well as being supported by AHRC Digital Transformations, this project was part of British Science Week, supported by the British Science Association.

Created: 15 Jul 2021 / Updated: 15 Jul 2021

